For foreign partners
For foreign partnersРыба-робот занимается синхронным плаванием
Это команда пионеров в мире подводных роботов. В отличие от большинства океанских роботов, которым для передачи информации требуется периодическая связь с учеными или со спутником-посредником, они могут работать совместно, связываясь только друг с другом.
За прошедшие пять лет ассистент профессора аэронавтики и астронавтики Kристи Моргансен, Университет Вашингтона (University of Washington – UW), Сиэтл, США изготовила три робо-рыбы (Robofish), которые способны осуществлять связь между собой под водой. Недавно на семинаре «Навигация, наведение и управление подводными аппаратами», проводившейся Международной федерацией по автоматическому управлению, она представила успешные результаты первых испытаний. Роботы были запрограммированы таким образом, что они плыли все либо в одном направлении, либо – все в разных направлениях. Это основной набор команд для координации движения группы.
Успех испытаний во внутреннем резервуаре в конечном итоге позволит создать системы для исследования отдаленных уголков океана.
Подводные роботы не нуждаются в кислороде, им нет необходимости подходить к поверхности, пока их задача не выполнена. В будущем океанские роботы могли бы, двигаясь вместе, следовать за перемещающимися под водой целями, к примеру, за группой китов или за распространяющимися струями загрязнений. Могли бы исследовать подводные пещеры, когда поверхность воды скована льдом, или перемещаться в опасной окружающей среде, где всплытие невозможно. Косяки роботов могли бы работать вместе, выполняя задачи, с которыми нельзя справиться в одиночку. Так можно было бы прослеживать большие стада морских животных или составлять карты загрязненных территорий, которое могут расти и изменять форму.
Соавторами данной работы были докторанты аэронавтики и астронавтики UW Дэниэл Кляйн и Бенджамин Триплетт и аспирант-электротехник UW Патрик Беттейл. В поддержку этого исследования Национальный научный фонд США и Управление научных исследований ВВС США предоставили гранты.
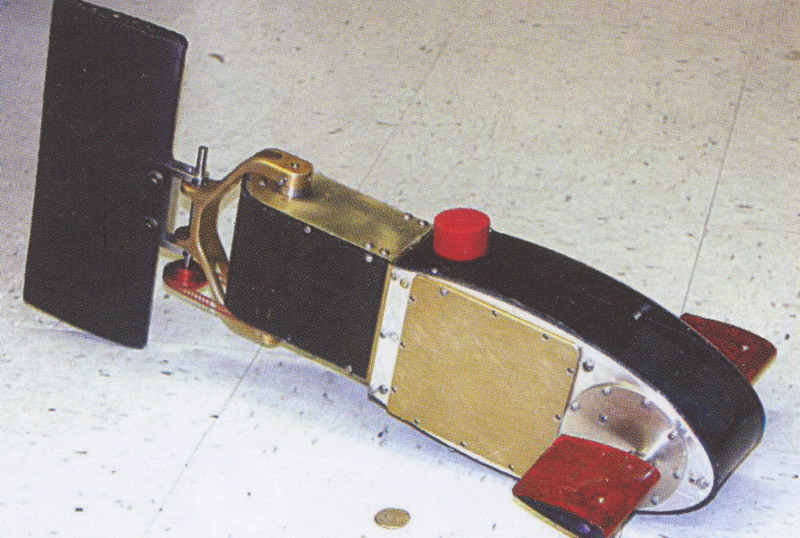
Робо-рыба действительно похожа на рыбу размером с лосося килограмма на 4,5. Ее оперение напоминает скорее плавники, чем винты. Создатели робо-рыбы считают, что благодаря этому уменьшается лобовое сопротивление и потенциально она более маневренна, чем подводные аппараты, приводимые в движение винтом.
Похожих на рыб роботов создают и другие исследовательские группы, однако новаторской эту систему делает то, что рыба-робот может поддерживать под водой беспроводную связь. Вдохновляли Моргансен опять-таки естественные системы. Чтобы записать образцы поведения косяков рыбы, инженеры сотрудничали с Джулией Пэрриш, адъюнкт-профессором факультета акванаук и рыбоводства UW.
Kристи Моргансен объяснила, что сбившиеся в косяк рыбы или движущиеся стадом животные совершают гораздо более эффективные и плавные маневры, чем те, которые могут воссоздать инженеры. Цель экспериментов с косяками живой рыбы состоит в том, чтобы понять, как они это делают. Возможно, тогда появятся какие-то новые идеи инженерных решений.
Часть живой рыбы приучили подплывать к кормушке, реагируя на раздражитель. После этого ученые обнаружили, что по сигналу к кормушке плыл весь косяк, даже если реагировать на раздражитель приучали менее трети всей рыбы. Возникал вопрос: возможно ли, чтобы остальные робо-рыбы из группы действовали, основываясь на маневрах одной робо-рыбы?*
Вне зависимости от поисков оптимального способа координировать движение роботов, основной проблемой, с которой столкнулись исследователи, стала передача информации через толщу воды.
Моргансен пояснила, что, находясь под водой, невозможно передать много данных. При современном уровне развития техники – это 80 байт или порядка 32 чисел в секунду. Энергия, необходимая, чтобы передать информацию на большое расстояние чрезмерно высока, поскольку мощность батарей роботов ограничена. Более того, сигналы могут искажаться при отражении от поверхности или от любых препятствий.
Сообщения между роботами передавались на низкой частоте импульсов сонара или упругими волнами. Результаты показали, что всего лишь около половины информации было получено успешно, тем не менее, робо-рыбы, благодаря заложенной в них программе, все еще были способны выполнить поставленные ранее задачи. Роботы, которые могут независимо выполнять два простых набора команд – плыть в одном направлении или плыть в разных направлениях – могут выполнять и более сложные задачи.
Используя способность рыб к координации, ученые постарались приблизить поставленную перед робо-рыбами задачу к той, с которой они столкнулись бы в океане.
Каталог продукции
Барокамеры и барокомплексы
Пневматические и гидравлические системы
Водолазное снаряжение
Средства для обеспечения водолазных спусков и подводно-технических работ
Гидрокостюмы
Компрессорное оборудование
Средства подводного позиционирования, поиска, обнаружения, передачи данных
Снаряжение специального назначения
Телеуправляемые подводные аппараты
Обитаемые подводные аппараты
Печатная продукция
198095, г. Санкт-Петербург, ул. Маршала Говорова, д. 35, лит. А, часть по. 21-Н, часть офиса 423
тел. +7 (812) 350-95-44
факс +7 (812) 350-07-86